-
पहले कोई रोबोट ऐसा नहीं कर पाता था
-
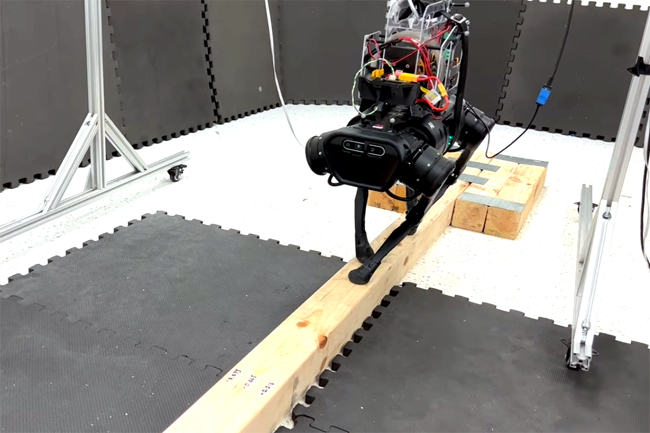
प्रयोग में यह छह ईंच की पटरी पर चला
-
इसमें और सुधार पर अभी काम जारी है
राष्ट्रीय खबर
रांचीः सर्कस के किसी नट को हम सभी ने पतली रस्सी पर चलते हुए करतब करते देखा है। इस क्रम में कई ऐसे लोग भी हुए, जिन्होंने काफी ऊंचाई पर टंगी रस्सी पर पैदल चलकर लोगों को हैरान कर दिया और विश्व रिकार्ड कायम किया। अब इस दिशा में पहली बार रोबोटिक्स में उम्मीद जगी है। कार्नेगी मेलॉन यूनिवर्सिटी के रोबोटिक्स इंस्टीट्यूट (आरआई) के शोधकर्ताओं ने एक ऐसी प्रणाली तैयार की है जो एक संकीर्ण संतुलन बीम पर चलने के लिए रोबोट को कारगर बनाता है। चार पैरों वाले इस प्रोटोटाइप रोबोट का परीक्षण भी हुआ है। इसे अपने तरह की पहली उपलब्धि माना जा रहा है क्योंकि खुद ही संतुलन बनाते हुए चलना कोई आसान काम नहीं है।
देखें इस रोबोट का चलना
किसी रोबोट के लिए यह और भी कठिन काम है। लेकिन शोधकर्ताओं ने इसे सफल कर दिखाया है। आरआई में सहायक प्रोफेसर और रोबोटिक एक्सप्लोरेशन लैब के प्रमुख ज़ाचरी मैनचेस्टर ने कहा यह प्रयोग दरअसल अपने आप में बहुत बड़ा था। वह कहते हैं कि मुझे नहीं लगता कि किसी ने पहले कभी किसी रोबोट के साथ चलने में सफलतापूर्वक बैलेंस बीम किया है।
हार्डवेयर का उपयोग करके अक्सर अंतरिक्ष में उपग्रहों को नियंत्रित करने के लिए उपयोग किया जाता है, मैनचेस्टर और उनकी टीम चौगुनी डिजाइन में मौजूदा बाधाओं को संतुलित करने की क्षमता में सुधार करने के लिए काम कर रही है। अधिकांश आधुनिक चतुष्कोणीय रोबोटों के मानक तत्वों में एक धड़ और चार पैर शामिल होते हैं जो प्रत्येक गोल पैर में समाप्त होते हैं, जिससे रोबोट को बुनियादी, सपाट सतहों और यहां तक कि सीढ़ियों पर चढ़ने की सुविधा मिलती है।
उनका डिज़ाइन चार पैरों वाले जानवर जैसा दिखता है, लेकिन चीते के विपरीत जो अपनी पूंछ का उपयोग तेज मोड़ या गिरने वाली बिल्लियों को नियंत्रित करने के लिए कर सकते हैं जो अपनी लचीली रीढ़ की मदद से मध्य हवा में अपने खुद को संतुलित करते हैं। किसी चार पैरों वाले रोबोटों में ऐसे गुण नहीं होते।
जब तक रोबोट के तीन पैर जमीन के संपर्क में रहते हैं, तब तक वह पलटने से बच सकता है। लेकिन अगर केवल एक या दो फुट जमीन पर हैं, तो रोबोट गड़बड़ी के लिए आसानी से सुधार नहीं कर सकता है और गिरने का जोखिम बहुत अधिक है। संतुलन की यह कमी उबड़-खाबड़ इलाकों पर चलना विशेष रूप से कठिन बना देती है। प्रो. मैनचेस्टर ने कहा, मौजूदा नियंत्रण विधियों के साथ, एक चौगुने रोबोट के शरीर और पैरों को अलग कर दिया जाता है और वे एक दूसरे से संवाद नहीं करते हैं। तो हम उनका संतुलन कैसे सुधार सकते हैं?
टीम का समाधान एक प्रतिक्रिया व्हील एक्ट्यूएटर (आरडब्ल्यूए) प्रणाली को नियोजित करता है जो ऐसे रोबोट के पीछे स्थापित होता है। एक नई नियंत्रण तकनीक की मदद से, आरडब्ल्यूए रोबोट को अपने पैरों की स्थिति से स्वतंत्र संतुलन बनाने की अनुमति देता है। आरआई स्नातक छात्र ची-येन ली और मैकेनिकल इंजीनियरिंग स्नातक छात्रों शुओ यांग और बेंजामिन बोक्सर के साथ परियोजना पर काम करने वाले मैनचेस्टर ने कहा, रोबोट में मूल रूप से मोटर के साथ एक बड़ा चक्का है।
यदि आप भारी चक्का को एक तरह से घुमाते हैं, तो यह उपग्रह को दूसरी तरह से घुमाता है। अब इसे लें और इसे चौगुने रोबोट के शरीर पर रख दें। रोबोट के कोणीय गति पर नियंत्रण प्रदान करने के लिए टीम ने एक प्रोटोटाइप बनाया। मैनचेस्टर ने कहा कि आरडब्ल्यूए के लिए मौजूदा नियंत्रण ढांचे को संशोधित करना आसान था क्योंकि हार्डवेयर रोबोट के बड़े पैमाने पर वितरण को नहीं बदलता है, न ही इसमें पूंछ या रीढ़ की संयुक्त सीमाएं होती हैं। इस तरह की बाधाओं के लिए और एक अंतरिक्ष यान का एक आदर्श मॉडल) की तरह तैयार किया जा सकता है और एक मानक मॉडल-भविष्य कहनेवाला नियंत्रण एल्गोरिथ्म में एकीकृत किया जा सकता है।
प्रयोग में, उन्होंने रोबोट को लगभग आधे मीटर से उल्टा गिराकर क्लासिक फॉलिंग-कैट प्रॉब्लम की नकल की, आरडब्ल्यूए ने रोबोट को मध्य-हवा में खुद को बदलने और अपने पैरों पर जमीन को सक्षम करने में सक्षम बनाया। हार्डवेयर पर, उन्होंने रोबोट की गड़बड़ी से उबरने की क्षमता – साथ ही सिस्टम की संतुलन क्षमता – एक प्रयोग के साथ दिखाया जहां रोबोट 6-सेंटीमीटर चौड़ा बैलेंस बीम के साथ चलता था। मैनचेस्टर मानते हैं कि ऐसा रोबोट जल्द ही प्रयोगशालाओं में मुख्य रूप से अनुसंधान प्लेटफार्मों से व्यापक रूप से उपलब्ध व्यावसायिक उपयोग के उत्पादों में परिवर्तित हो जाएंगे, जहां लगभग 10 साल पहले ड्रोन थे। शोध दल इसे और विकसित करने में जुटा है।